M.Kučera
Obsah stavebnice a příprava
Celá stavebnice MagLevu obsahuje veškeré mechanické i elektronické součástky. Pro sestavení je třeba jen trafopájky, voltmetru a ohmmetru, trochu cínu, křížový a plochý šroubovák a bastlířům známá trpělivost. Stavenice neobsahuje napájecí zdroj, obvod podporuje napájení adaptérem na stejnosměrné napětí 12V cca 500mA. Pro spínané vcelku běžné adaptéry je vhodné doplnit vstupní filtr – dva kondenzátory, jak ve uvedeno v textu dále. Není to ale nezbytně nutné.
Jde o stavebnici analogovou, tzn. veškeré signály od Hallových senzorů, přes balancování operačními zesilovači až po kompenzaci magnetického polštáře probíhá analogově.
Po rozbalení stavebnice se nám dostane mnoha součástek.
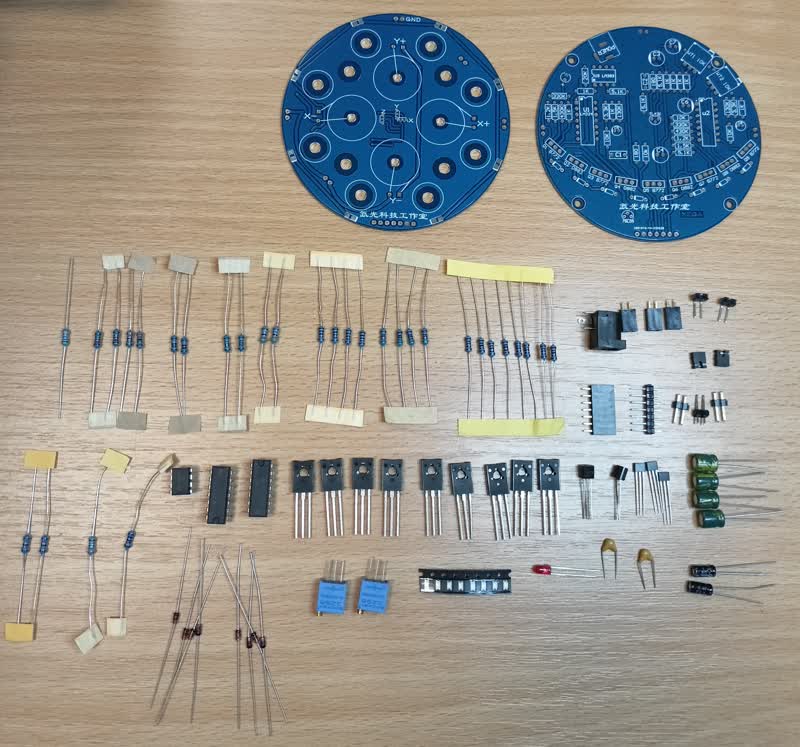
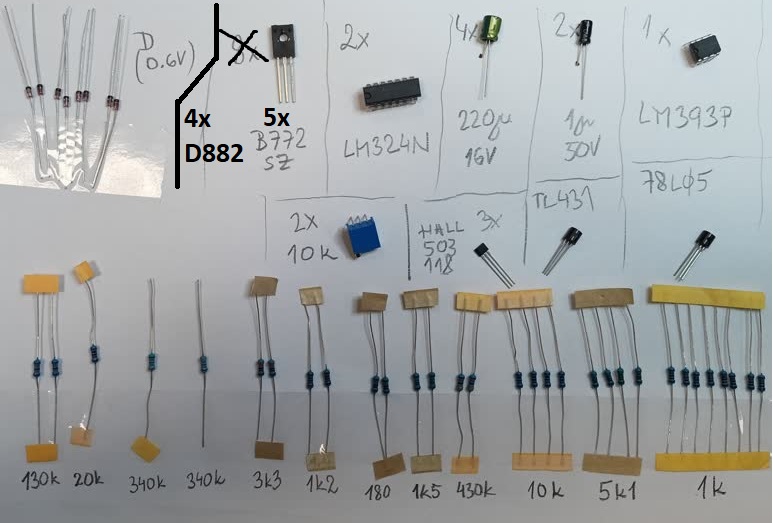
V prvním kroku provedeme kontrolu počtu a typů součástek. Přestože bývají rezistory “slepené” podle své hodnoty, je vhodné si je jednotlivě proměřit.
Na obrázku je uvedena soustava součástek s popisy.
Mechanické prvky a podpůrné elektromagnety a neodymové magnety jsou obsaženy opět v logických počtech, jak je vidět níže.


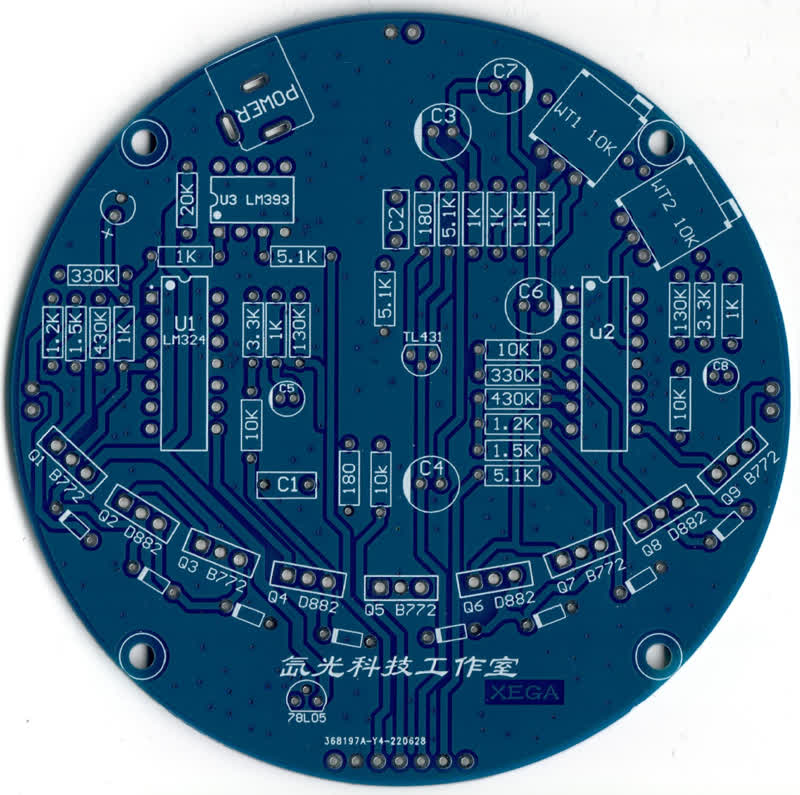
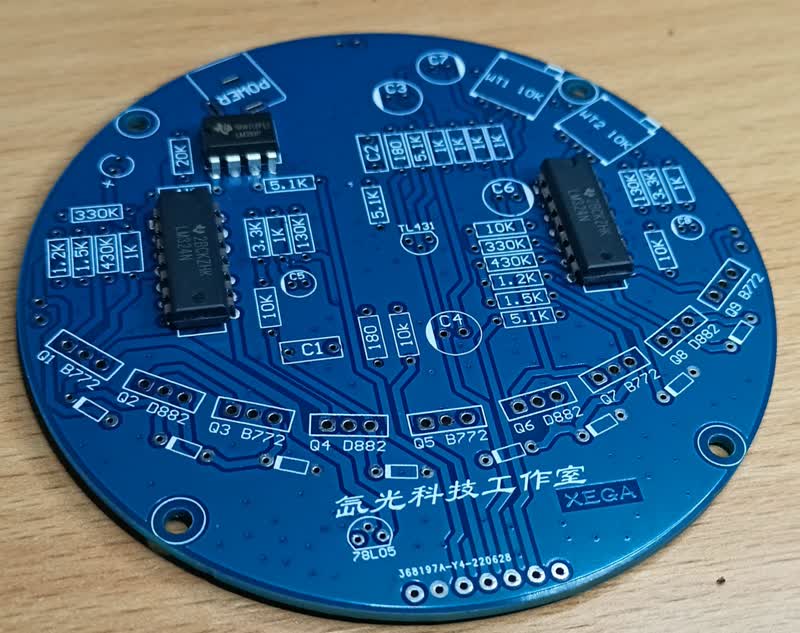
Základové desky jdou dvě. První obsahuje veškerou řídící elektroniku a horní obsahuje nosné magnety, kompenzační elektromagnety, 3 hallovy čidla a efektové SMD led diody. V příloze je xerokopie obou desek s perfektními popisky pro umístění jednotlivých součástek. Pouze chybí uvedení polarity u diod a osazení tranzistorů.
Montáž přízemí
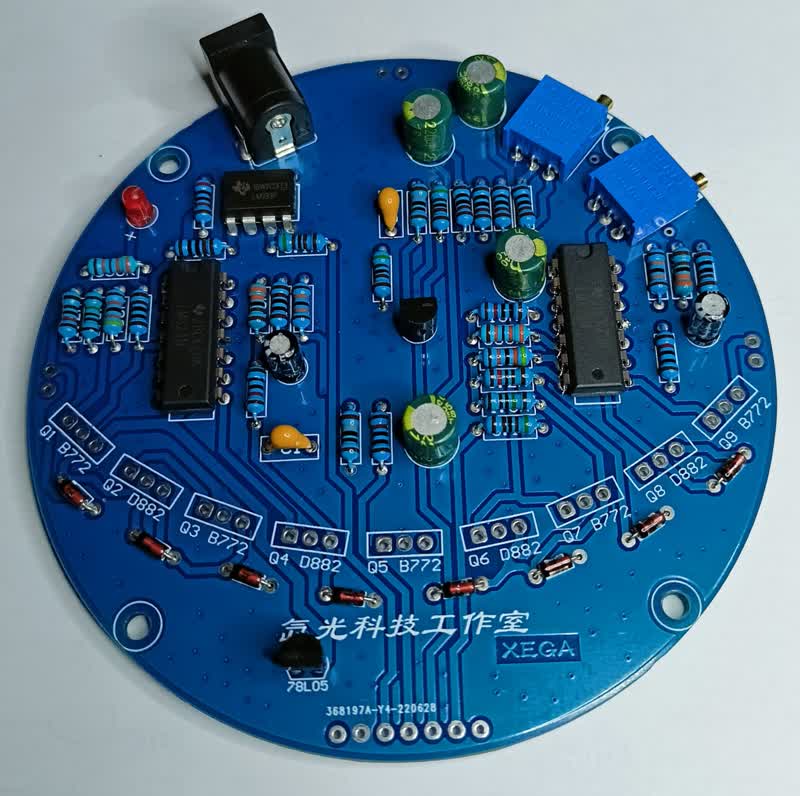
Přízemní část stavebnice je osaditelná běžným postupem. Použito trafopájky, neb některé prokovené zemnící kontakty odvádí dost tepla. To si lze ověřit u napájecího konektoru.
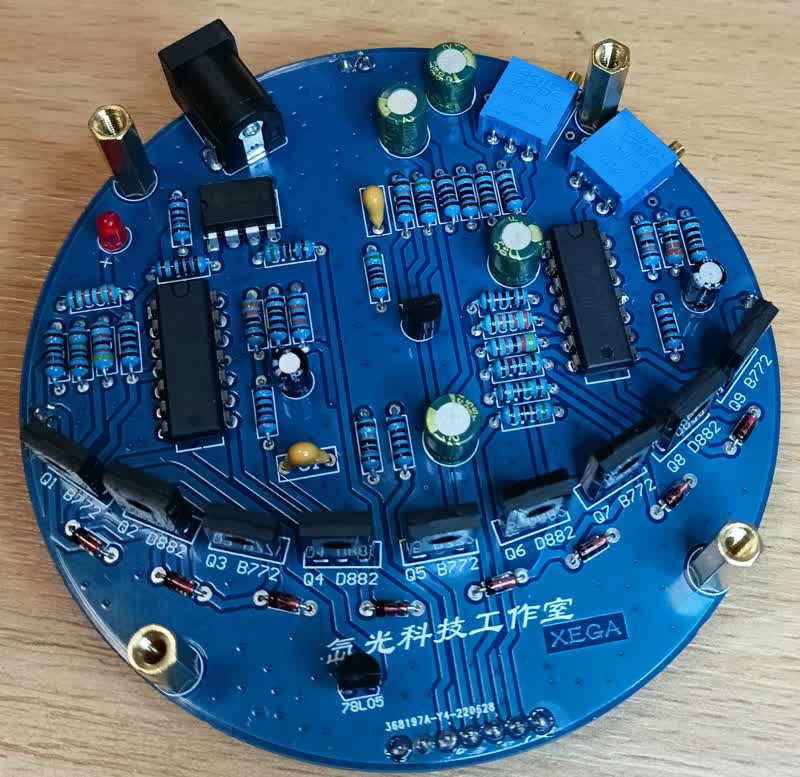
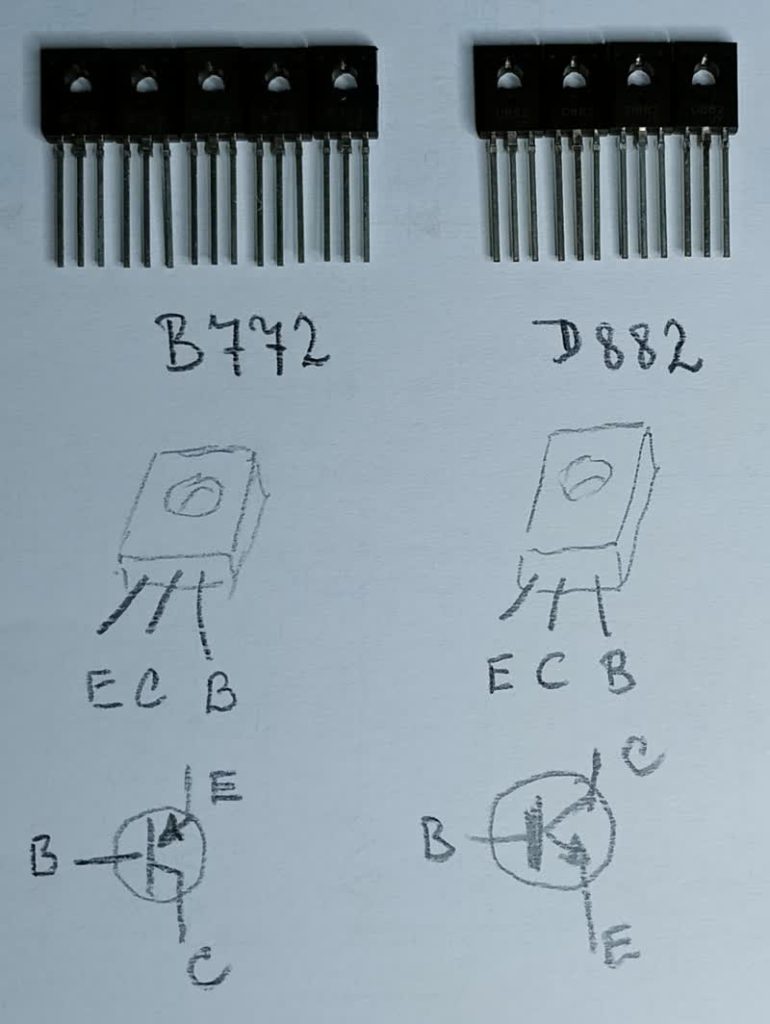
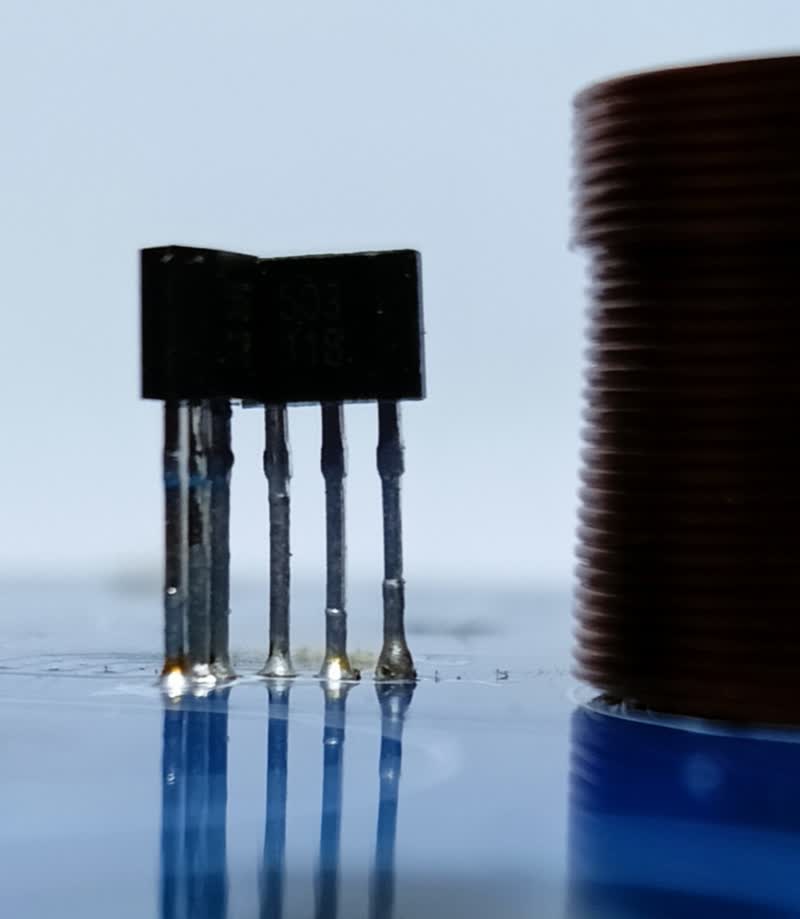
U obou typů tranzistorů je vhodné ověřit jejich umístění. Z fotografií i různých zdrojů na internetu je patrné, že patří osadit do půlkruhu, a to pokovenou stranou vně. Na forografii jsou viditelné mosazné sloupky, které jsou určeny jako nosné sloupky celé stavebnice, tj. tato vrstva součástek je nakonci otočená směrem dolů a roli distančních sloupků s prvním patrem plní 4 konektory pro přívod napětí a sběr signálů z horní desky.
Montáž patra
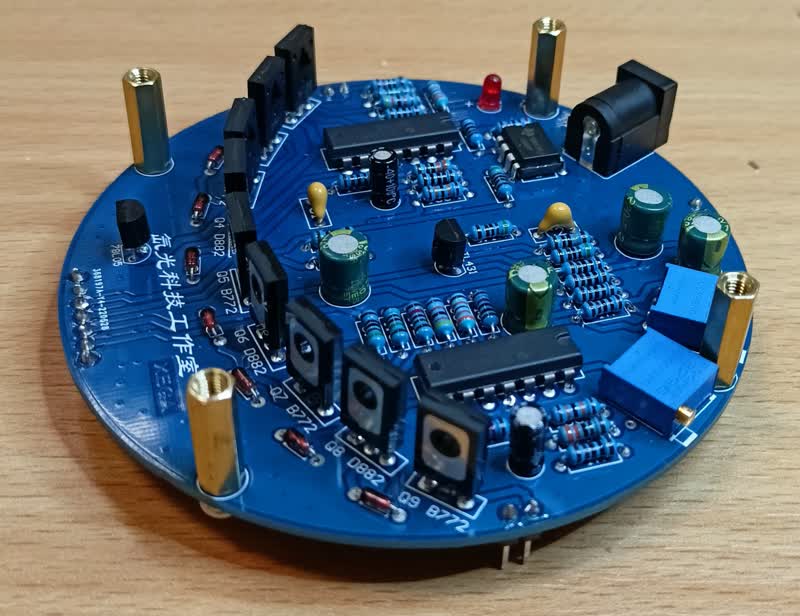
Montáž jsem započal SMD diodami. Naneštěstí není deska značená polarita, ale jejich osazení je velice průzračné. Doplněno v obrázku žlutými symboly. 


Po zapojení je možné funkci LEDek ověřit zapojením 12V na přípojný konektor. (anebo již zapojením spodní desky na vstup 12V a propojením “nasucho” spojkou, jak je vidět vpravo na obrázku.
Dalším postupem je vhodné připájet 3 hallovy čidla. Jejich umístění je správně naznačeno na samotné PCB. Dvě čidla pro snímání změny magnetického pole v osách x, y by měly být umístěná kolmo a ve stejné výšce. Jde asi o třetinu výšky cívky. A Čidlo pro svislou osu Z co možná nejvýše, tj. v horní rovině cívek. K tomuto účelu jsem nasucho přišrouboval jednu cívku, desku umístil na “izolepový stativ” a čidla připájel.
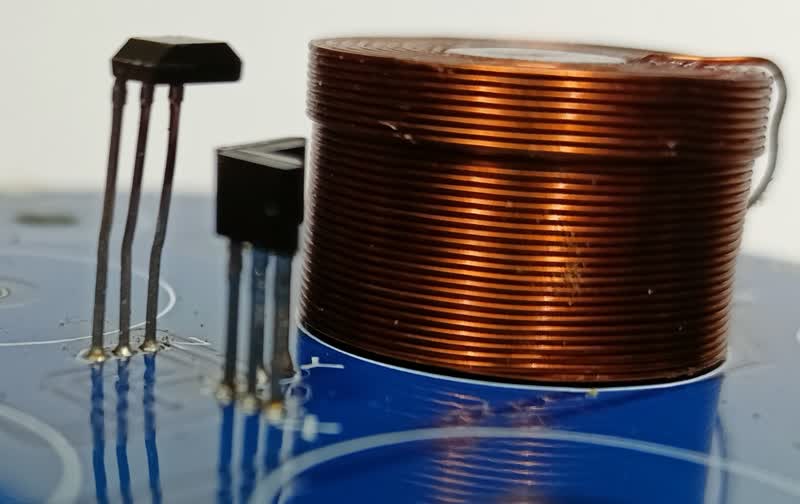

Pro zvědavce je zde uvedena detailní fotografie cívky:

Cívky jsou vinuté lakovanou mědí tl. 0.3mm, vnější průměr 18.6mm, výška 12.3mm, průměr jádra 7,9mm, ohmický odpor 4,2Ω
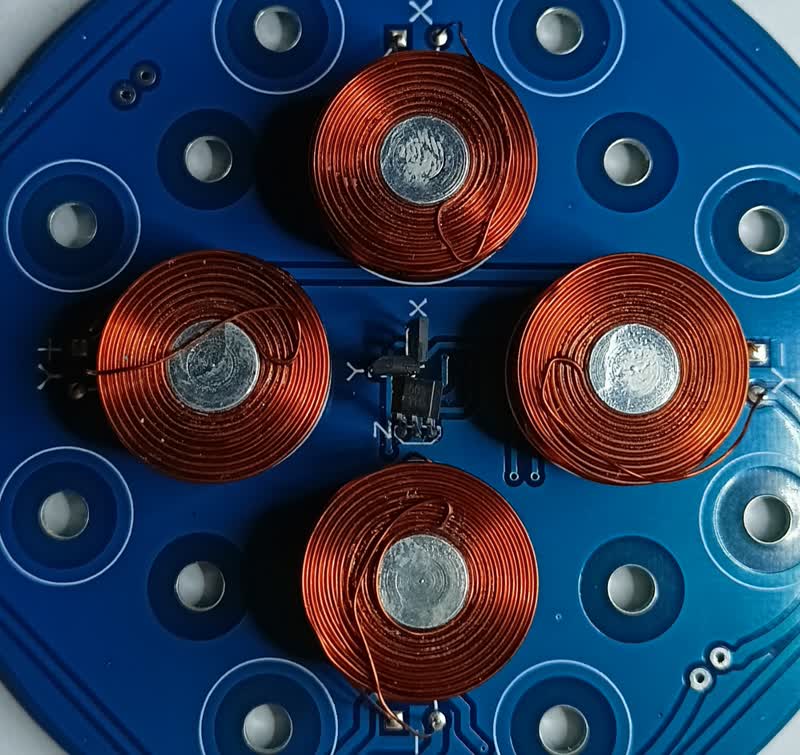
V dalším kroku je možné již přimontovat a připájet jednotlivé cívky.
Jejich umístění je libovolné, mají stejný směr vinutí. Závit jader cívek je určen pro kratší šrouby M3. Delší šrouby M3 jsou určeny pro mosazné nohy.
Před pájením vývodů cívek je šikovné ověřit například pomocí Ampérova pravidla pravé ruky[5]: ohnuté prsty pravé ruky po směru tekoucího proudu, palec ukazuje severní pól (N) cívky.
Protichůdný pár cívek je zapojen do série s tím, že protékající proud budí na horním konci cívky severní magnetický pól a a druhé jižní. Tento princip zapojení je logicky navržen tak, že pro kompenzaci (vlastně jen vyhlazování) magnetického pole nad horním patrem postačuje jeden obvod X (s využitím obou polarit) a jeden obvod Y.
Další obrázek dvou demo cívek cívek vysvětluje způsob vinutí a kompenzace statického magnetického polštáře:
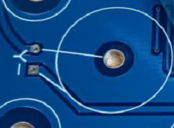
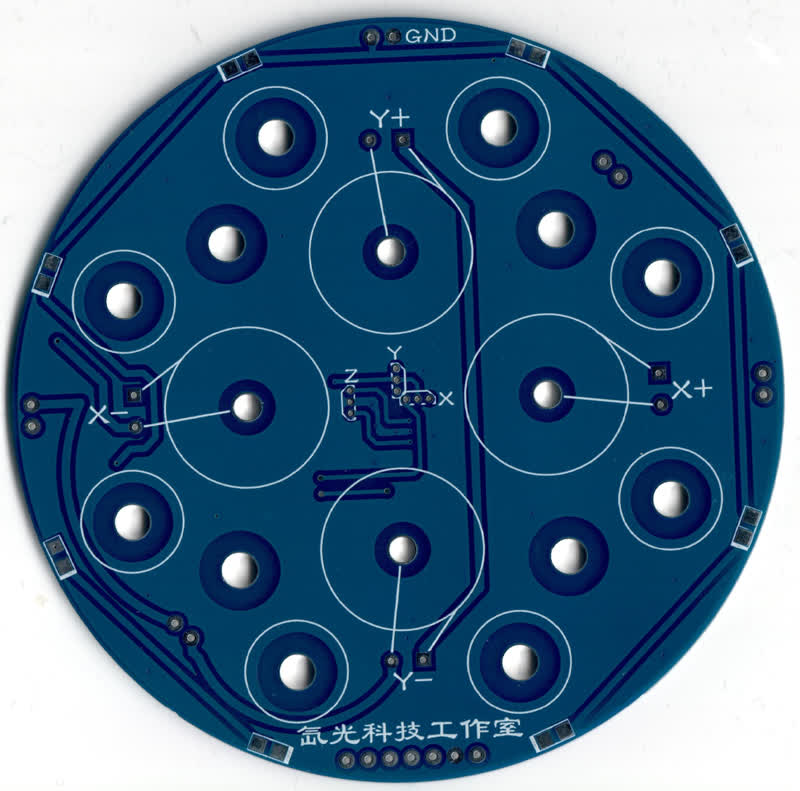
Návodné značení bílou barvou pod cívkami je nutné interpretovat takto:
čára od středu cívky značí připojení vodiče ze středu cívky (cívky mají tento vývod nahoře) a tečná čára značí připájení vnějšího konce cívky. Zde může být zavádějící, že značení jakoby reflektovalo směr vinutí cívky. Nikoli. Všechny cívky mají stejný smysl vinutí.
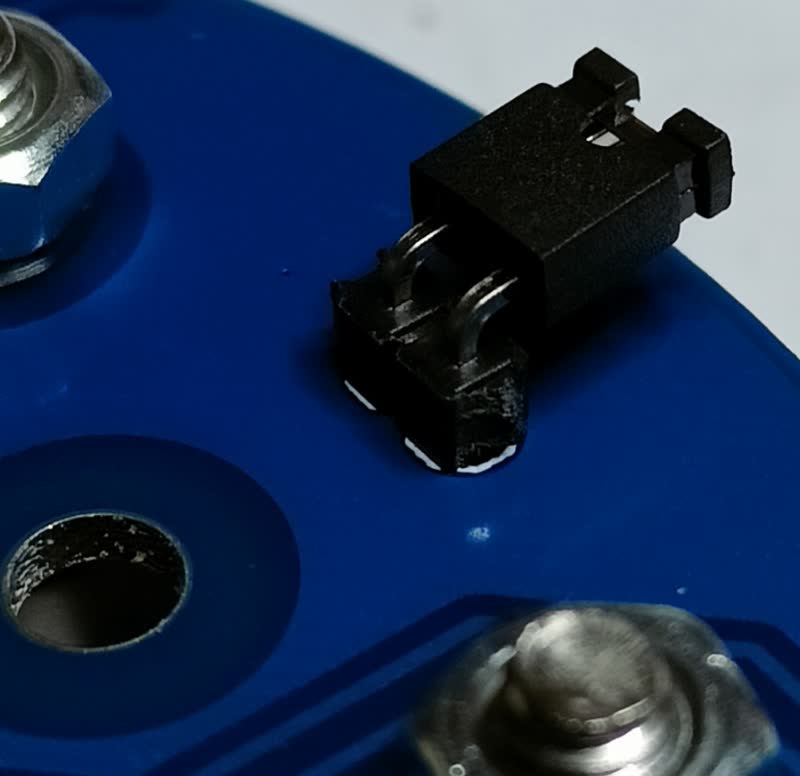
Dalším krokem je připájení konektorů k propojení přízemní desky a dvou propojek pro možnost odpojení obou párů cívek. Pro úplnost popisuji sedmipinový konektor pro napájení a signály hallových senzorů. Svislý Z-ový senzor má zem a napájení zvlášť. Je to pravděpodobně z toho důvodu, že slouží pouze pro detekci plovoucího magnetu. Bez umístění plovoucího magnetu je celé zařízení v pasivním stavu s minimálním spotřebou energie.
Kvůli charakteristice některých spínaných zdrojů jsem využil jednoho nápadu z internetu, a ke vstupnímu konektoru paralelně připojil elektrolytický kondenzátor 100μF/16V a 100nF/50V. Na obrázku je umístění těsně za přípojný konektor ke dvěma pinů, které vedou vstupních 12V k hornímu patru k led diodám.

 .
.
Nastavení pracovního bodu
Po sestavení celého přístroje je možné do prostoru nad magnety umístit plovoucí disk. Zde je nutné využít trpělivosti, protože bylo by opravdu náhodné, pokud by disk započal levitovat. Po detekci magnetického pole plováku se rozsvítí červená LED dioda pod spodním patrem.
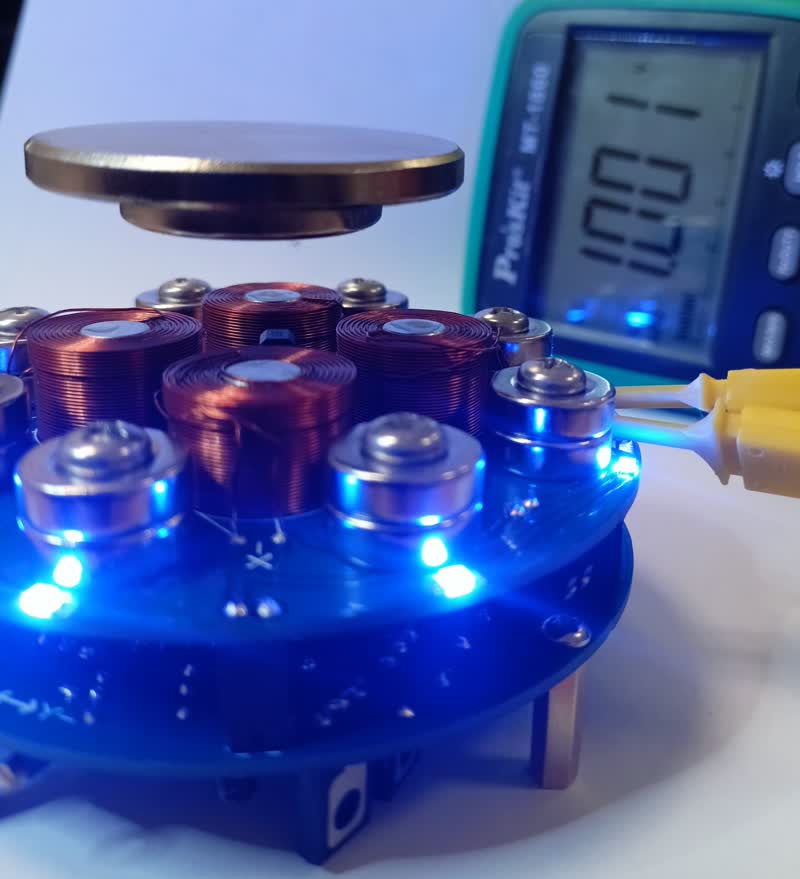
Použil jsem poněkud přímé metody ladění os X a Y pomocí trimrů. Obě cívky jsou v zapnutém stavu a na jeden pár jsem připojil voltmetr. Umístil magnet asi
15 milimetrů nad rovinu cívek (použita umělohmotná distance), přidržel v pevné poloze a posouval odpovídajícím trimrem tak, aby napětí, které původně kolísalo mezi + – 3 volty mělo minimální výkyv. Na obrázku vpravo je již zařízení vybalancováno a napětí se pohybuje kolem +- 100mV.
Trpělivost montéra se musí opřít o skutečnost, že vylaďovací víceotáčkové trimry mají cca 25 otáček a pouze v rozmezí asi jedné otáčky je plovoucí magnet stabilní.
Překvapujícím zjištěním bylo, že levitátor může po zapnutí pár vteřin vykazovat jistou nestabilitu, ale opět jsem si zdůvodnil, že se analogový balanční systém musí jednoduše “zahřát”.
Schopnosti maglevu
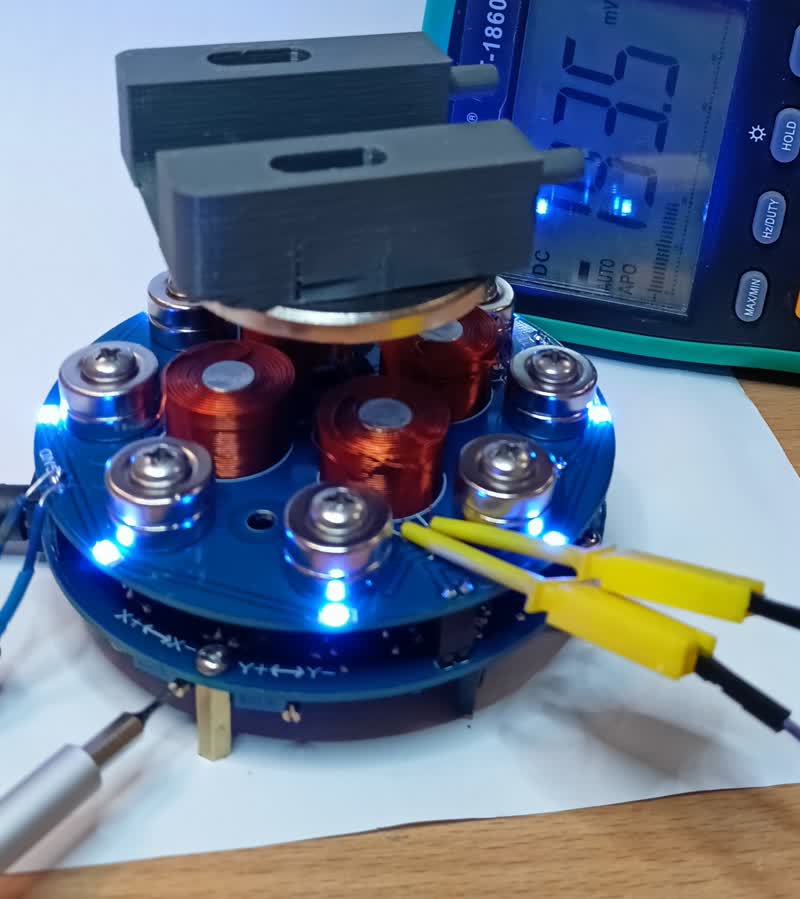
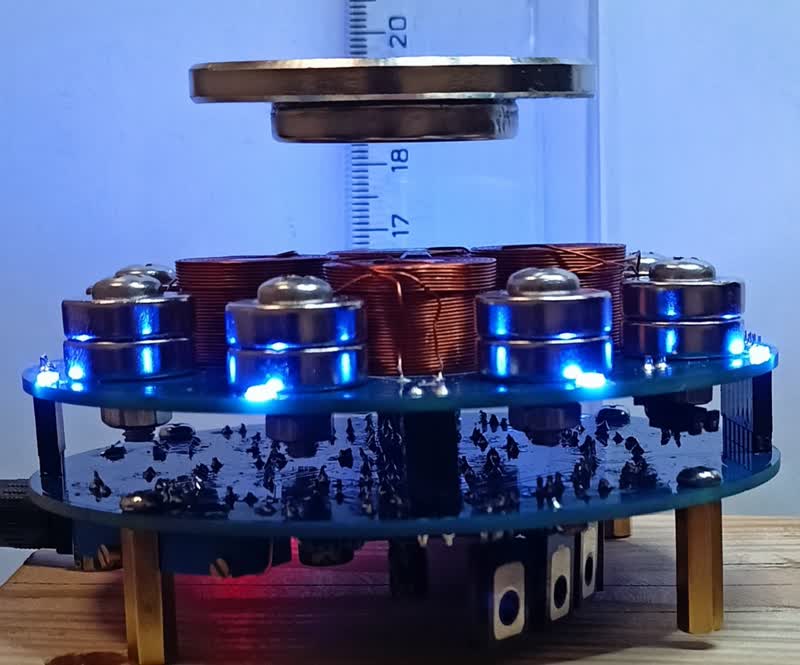
Ve vyváženém stavu je výška levitujícího magnetu (86g) asi 16mm nad rovinou el magnetů. Při zvětšení zátěže na 160g klesá asi na 11mm.
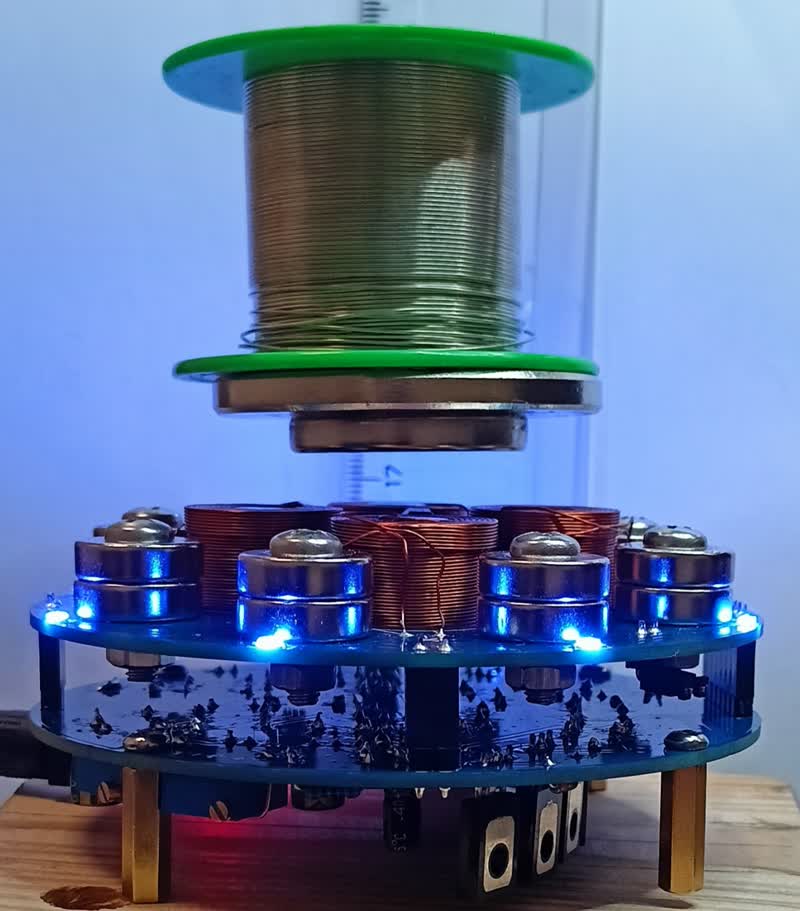


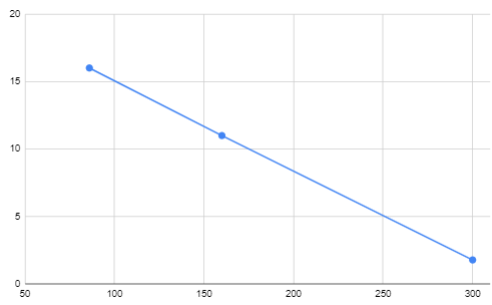
Pouhým vynesením dvou měřících bodů do grafu je patrné, že v případě linearity je zařízení deklarováno s maximální nosností 300 g (teoretická výška 2 milimetry).
Další velice příjemné zjištění: Změna hmotnosti levitujícího nákladu nevyžaduje dodatečné ladění os x,y!
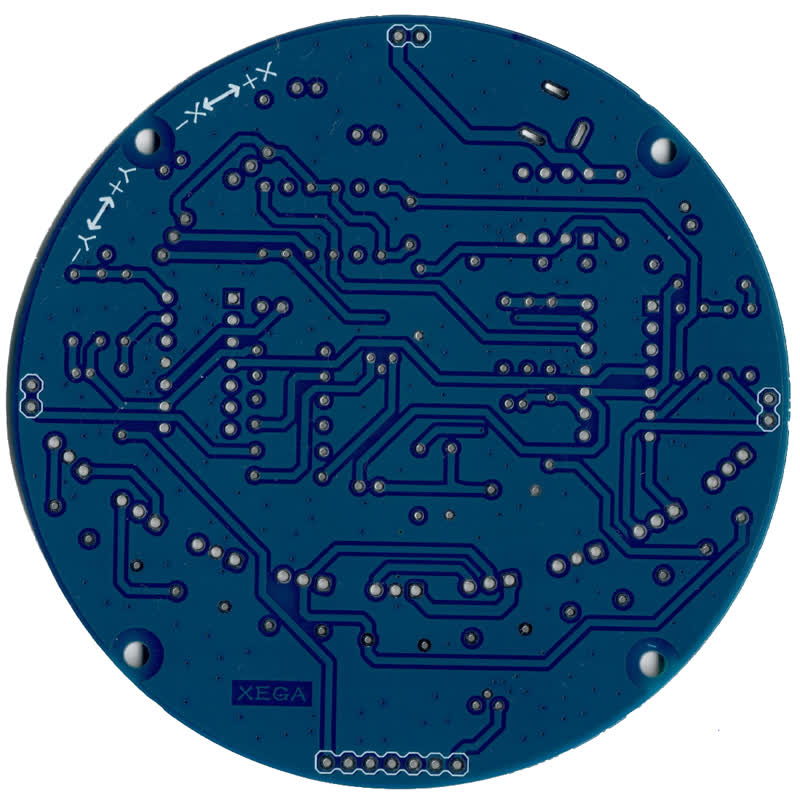
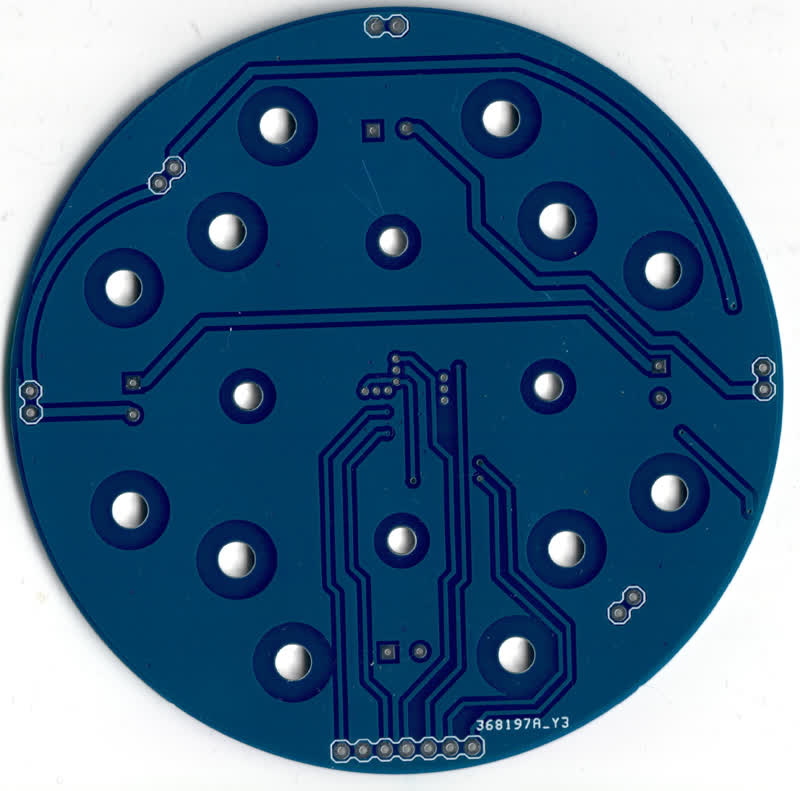
Obě desky PCB. Průměr 90mm tl. 1,6mm.