


GY-521 
GY-521
Chceš udělat svůj dron nebo RC letadlo z Arduina, ale nevíš, jak přimět gyro k práci? Možná už jsi koupil šestiosý GY-521 modul a zjistils, že to není tak jednoduché? Zkus tento návod!
Naučíš se zapojit jednoduchý obvod pro otestování MPU6050 s Arduinem a simulovat “YAW, PITCH a ROLL“ na 3D modelu letadla na obrazovce. Toto slouží jako učebnicová pomůcka k seznámení s gyroskopem a k nainstalování potřebných knihoven do Arduino IDE.
Co potřebuješ?
• 1 x Arduino UNO
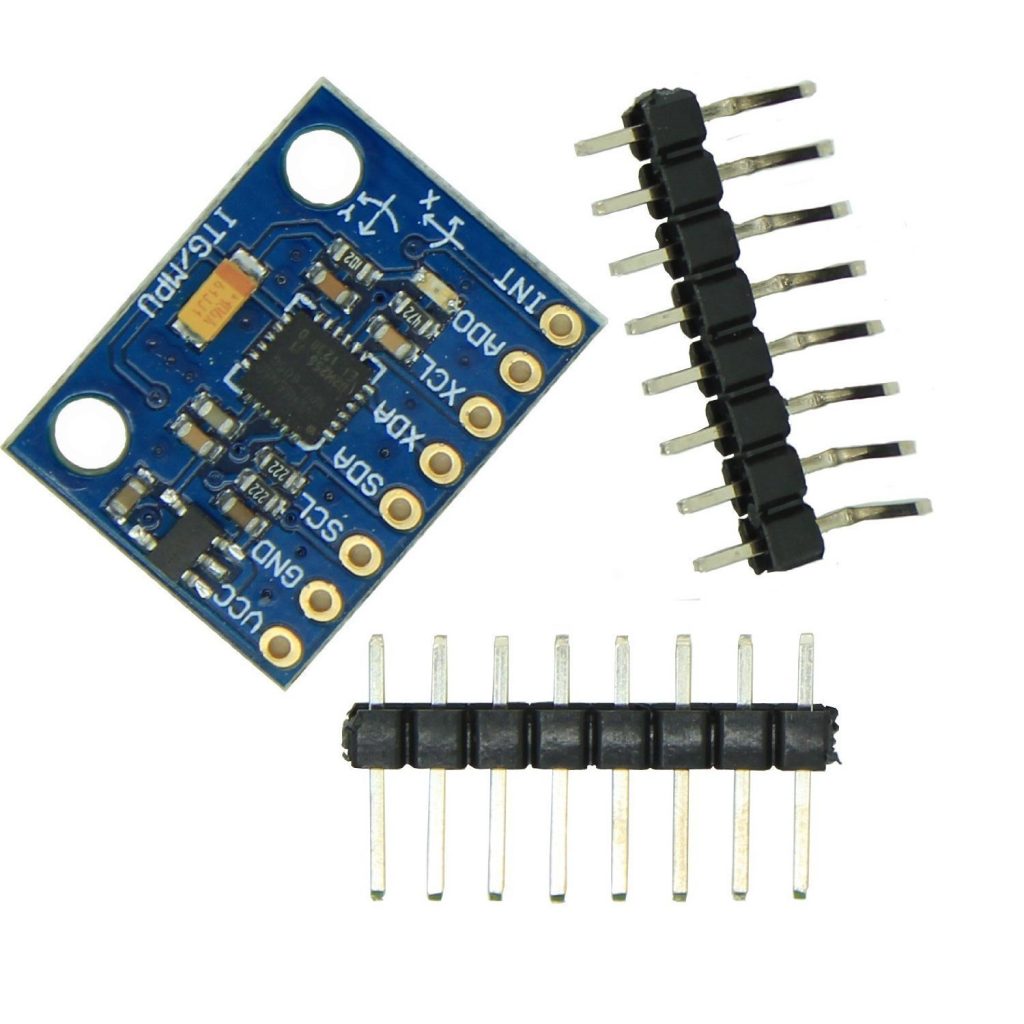
• 1 x GY-521 akcelerometr
• Samec-samice kablíky
• Pájecí stroj
Krok 1: Zapoj obvod jak je uvedeno


Pro informaci:
- Gyro modul komunikuje s Arduinem přes sériovou sběrnici I2C a SCL + SDA
- Čip MPU6050 potřebuje 3.3V. Regulátor napětí modulu GY-521 umožňuje napájet desku 5V.
- Více informací o tomto modulu nalezneš na stránce: Arduino Playground, ale vše tam je v angličtině.
Krok 2: Instalace I2Cdev a MPU6050 knihoven

Pokud bychom psali kód od nuly, trvalo by to věčnost. Dobrá zpráva je, že někdo už těžkou práci pro nás udělal. Jeff Rowberg napsal Arduino knihovny k získání dat z akcelerometru / gyra a potřebných výpočtů. Jsou dostupné jako zip:
https://github.com/jrowberg/i2cdevlib/zipball/master
Po odzipování v ní najdeš Arduino složku, která má další dvě podložky: „I2Cdev“ a „MPU6050“. Obě dvě složky zkopíruj do své Arduino knihovny, která je na adrese:
C:\Program Files (x86)\Arduino\libraries v Windows
xxxxxxxxx v macOS
Pak nastartuj IDE a v sekci příklady najdeš MPU6050_DMP6 s MPU6050. Otevři ji, připoj Arduino k počítači, vyber potřebný COM Port a nahrej kód. V sériovém monitoru vyber rychlost 115200. Budeš upozorněn, že spojení s MPU6050 bylo úspěšné. Testovat můžeš začít stisknutím libovolné klávesy a pak Enter. Měla by se objevovat data.
Teď chceme zkusit 3D simulaci. Zavři sériový monitor a najdi řádek #define OUTPUT_READABLE_YAWPITCHROLL a zakomentuj. Najdi řádek: //#define OUTPUT_TEAPOT a odkomentuj. Ulož to “save as” a vyber, kam to uložíš. Nahraj kód do Arduina a neotevírej tentokrát sériový monitor.
Krok 3: Stáhni a nainstaluj poslední verzi Processing a knihovny
Ke spuštění 3D simulace otevřeme teapot demo ze složky MPU6050_DMP6, příklad od Jeffa Rowberga MPU6050 knihovny. Bohužel, Arduino IDE bude získávat pouze data. Pro zobrazení 3D simulace budeme potřebovat dodatečný software: Processing. Stáhni a rozbal, kam budeš chtít: https://processing.org/download/?processing
Potřebujeme jednu knhovnu pro 3D simulace: ToxicLib. Tuhle knihovnu rozbal do složky knihoven Processing. Poslední verze ToxicLibs je ke stažení zde:
https://bitbucket.org/postspectacular/toxiclibs/downloads/
Knihovny Processing najdeš tady: Processing: modes -> java -> libraries. Všechno rozbal do této složky.
Krok 4: Zkus 3D simulace

Teď otevři Processing a demo v následujícím pořadí:
Windows:
File -> Open -> C:\Program Files (x86)\Arduino\libraries\MPU6050\Examples\MPU6050_DMP6\Processing\MPUTeapot
macOS:
File -> Open -> Documents\Arduino\libraries\MPU6050\Examples\MPU6050_DMP6\Processing\MPUTeapot
Klikni na tlačítko “Play” a nehýbej s modulem po dobu 20-30 vteřin. Je to nutné pro kalibraci.

Teď vezmi gyro a zkus yaw / pitch / roll. Teď, když víš, že všechno funguje tak, jak má, můžeš odstartovat svůj vlastní projekt.
Jeslí se nic neděje, v souboru MPUTeapot.pde najdi řádek String portName = Serial.list()[0] a zakomentuj. Najdi řádek: //String portName = „/dev/tty.wchusbserial1420“ a odkomentuj.
Změň “ tty.wchusbserial1420″ na port, ve kterém máš připojené Arduino, např.: „COM3″ v windows, nebo “wchusbserial1420“ v Applu.






Jedna odpověď
Velká škoda, že modul nemá analogové výstupy a kód nezobrazuje název Define proměnné, do které se data gyroskopu vkládají. Vytáhnout data do použitelna snad jedině ze sériové linky do sebe zapojené na vícevláknových sériových linkách.
Příklad nedokáže zobrazit hodnoty z gyroskopu, jen je převede na grafický model v nějakém dalším programu.