

Jiří Hlavatý
Použitý materiál:
- Arduino UNO
- Motor shield
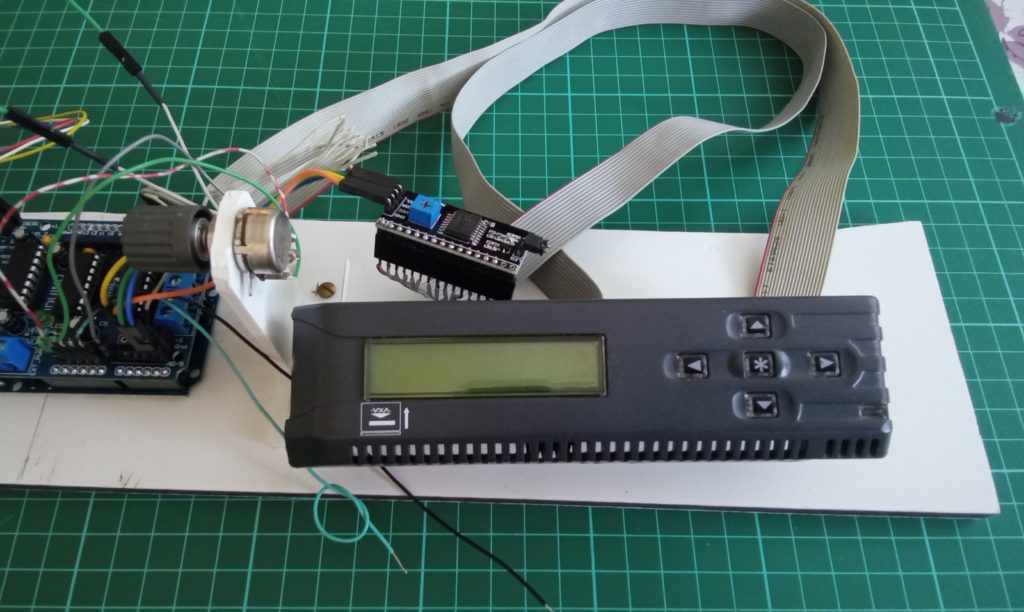
- LCD panel 16×2
- Převodník I2C – LCD
- Pět tlačítek
- Krokový motor
- Potenciometr 25k/N
Popis:
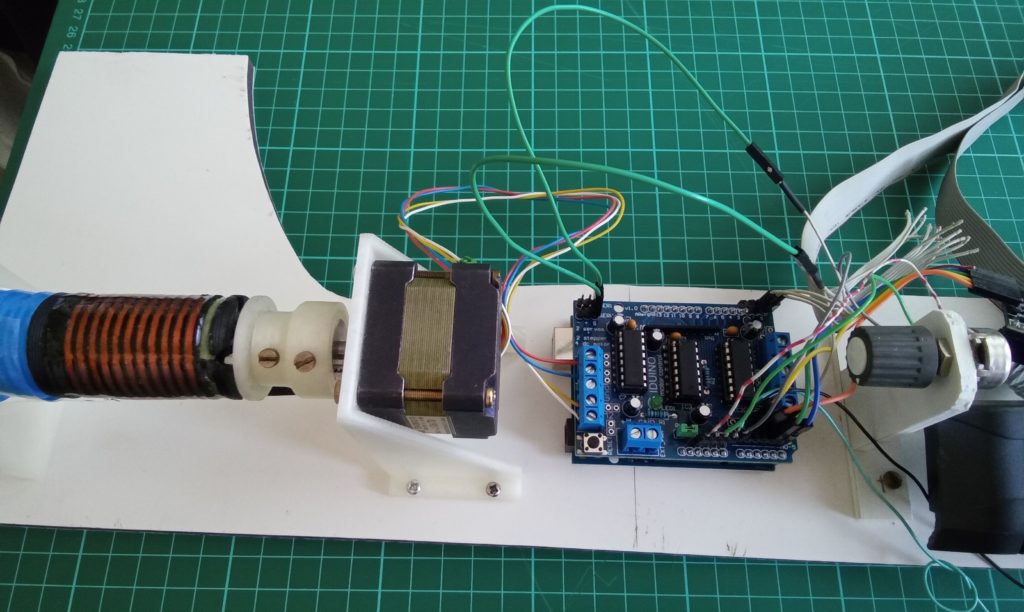
Program umožňuje pomocí menu nastavit počet požadovaných otáček (závitů cívky).
Při běhu programu je zobrazován počet zbývajících otáček. Potenciometrem se řídí rychlost navíjení. V případě problému je možno otáčení zastavit a po odstranění problému dále pokračovat. Potenciometr může být zabudován např. do pedálu.
Celé zařízení bylo sestaveno z „šuplíkových zásob“ (motor a LCD panel). Nicméně jsou to díly, které jsou běžně ve vašem sortimentu.
Není to ucelený projekt, jen provizorní zapojení. Držák motoru a cívky jsou tištěné na 3D tiskárně, ale byly navrženy pro můj specifický případ.
Ale třeba by byl přiložený program pro někoho použitelný.
Zapojení:
| Motor shield | I2C převodník | tlačítka | motor | potenciometr |
| M1, M2 | X | |||
| A4 | SDA | |||
| A5 | SCL | |||
| A0 | X | |||
| D0 | vlevo | |||
| D1 | vpravo | |||
| D2 | nahoru | |||
| D9/servo2 | dolu | |||
| D10/servo1 | enter | |||
| GND | GND | GND | GND | GND |
| +5V | +5V | +5V | ||
| +12V |

/*** Program pro řízení krok. motoru pro navíjení cívek ***
Arduino UNO + Motor Control Shield 2xL293D
Zobrazení stavu na LCD1602 připojeném přes převodník I2C
Ovládání menu pomocí pěti tlačítek VPRAVO, VLEVO, NAHORU, DOLU a ENTER
Řízení rychlosti motoru potenciometrem 25k (zapojení +5V, A0, GND)
*/
#include <AFMotor.h>
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
int MaxOt = 100; // default zadání počtu požadovaných závitů
int PolMen = 0; // indikátor běhu programu 0=setup, 1=start
int S = 11; //
int D = 12; // pozice pro zobrazení na LCD Stovky, Desítky, Jednotky
int J = 13; //
int PosCur;
// Tlačítka připojená na digitální vstupy proti zemi
const int Tleft = 0;
const int Tright = 1;
const int Tup = 2;
const int Tdown = 9;
const int Tenter = 10;
int StavTl = 1; // stav, kdy není stisknuté tlačítko
int StavTr = 1;
int StavTu = 1;
int StavTd = 1;
int StavTe = 1;
int PGMrun = 0; // během běhu navíjení nezobrazit MENU, 0 => MENU, 1 => RUN
// Menu
char Msetup[] = "=> SETUP start";
char Mstart[] = "setup => START";
const int stepsPerRevolution = 100; // motor STH-39G102
// 3,6deg/step => 100step/rev; 12V
const int partStep = 10; // počet kroků provedených stejnou rychlostí
const int MaxSpeed = 100; // nastavení max. rychlosti otáčení motoru na 100 rpm:
const int Smer = FORWARD; // směr otáčení motoru FORWARD nebo BACKWARD
LiquidCrystal_I2C lcd(0x27, 16, 2);
AF_Stepper myStepper(stepsPerRevolution, 1);
void setup() {
lcd.begin();
// Turn on the backlight and print a message.
lcd.backlight();
lcd.home();
lcd.print("Navijecka civek");
lcd.setCursor(0, 1);
lcd.print(Msetup); //zobrazení menu setup nebo start
// nastavení portů pro tlačítka
pinMode(Tleft,INPUT_PULLUP);
pinMode(Tright,INPUT_PULLUP);
pinMode(Tup,INPUT_PULLUP);
pinMode(Tdown,INPUT_PULLUP);
pinMode(Tenter,INPUT_PULLUP);
}
void loop() {
if (PGMrun < 1){
Menu();
switch(PolMen){
case 0: //setup
Nastav();
break;
case 1: //start
while(StavTe > 0){ // čekání na stisk Enter (*)
lcd.home();///////////
lcd.print("Pocet z. = ");
if (MaxOt < 100){lcd.print(" ");}
if (MaxOt < 10){lcd.print(" ");}
lcd.print(MaxOt);
lcd.setCursor(0, 1);
lcd.print("Stisk * => START");
StavTe = digitalRead(Tenter); // test na stisk (*)
}
StavTe = 1; // zrušit stisk *
PGMrun = 1; // povolení startu
break;
}
}
else {
lcd.setCursor(0, 1);///////
lcd.print("Zbyva z. = ");
Start(MaxOt);
}
}
void JednaOtacka(int Step){ // provedení jedné otáčky s možností zastavení
int i=Step; // pro případ zasukování drátu, po odstranění
while(i>0){ // problému lze pokračovat
// nastavení rychlosti:
int sensorReading = analogRead(A0); // čtení hodnoty potenciometru
// map it to a range from 0 to 100:
int motorSpeed = map(sensorReading, 0, 1023, 1, MaxSpeed); //
if (motorSpeed < 2){
while (motorSpeed < 2){ // čekání na odstranění zasukování
sensorReading = analogRead(A0);
// map it to a range from 0 to 100:
motorSpeed = map(sensorReading, 0, 1023, 1, MaxSpeed);
delay(1000);
}
}
myStepper.setSpeed(motorSpeed); // nastavení rychlosti motoru
myStepper.step(partStep, Smer, DOUBLE); //
i=i-10;
}
}
void Start(int Xotacek){ // spuštění motoru pro navinutí X otáček
for (int y=0;y<Xotacek;y++){
JednaOtacka(stepsPerRevolution);
ZobrazCislo(Xotacek-y-1); // zobrazení zbývajících otáček
}
PGMrun = 0; //zobrazení menu
lcd.home();
lcd.print("Navinuto ");
lcd.print(MaxOt);
lcd.print(" z. ");
lcd.setCursor(0, 1);
lcd.print(Msetup);
PolMen = 0;
delay(500);
}
void ZobrazCislo(int Cislo){ // zobrazení čísla na požadovanou pozici
int poz;
if (Cislo>99)
{
poz = S;
}
else if (Cislo>9)
{
poz = D;
}
else
{
poz = J;
}
lcd.setCursor(poz-1, 1);
lcd.print(" ");
lcd.setCursor(poz, 1);
lcd.print(Cislo);
}
void Menu(){ //výběr položek menu
while(StavTe > 0){ // čekání na stisk Enter (*)
StavTr = digitalRead(Tright); // při stisku pravého tlačítka změň zobrazení na => START
if (StavTr == 0){
lcd.setCursor(0, 1);
lcd.print(Mstart);
PolMen = 1; // vybráno START
}
StavTl = digitalRead(Tleft); // při stisku levého tlačítka změ%n na => SETUP
if (StavTl == 0){
lcd.setCursor(0, 1);
lcd.print(Msetup);
PolMen = 0; // vybráno SETUP
}
StavTe = digitalRead(Tenter); // test na stisk (*)
}
delay(500);
StavTe = 1;
}
void Nastav(){ // nastavení počtu závitů v SETUPu
if (MaxOt > 99){
PosCur = S;
}
else if (MaxOt > 9){
PosCur = D;
}
else{
PosCur = J;
}
lcd.home();
lcd.print("Pocet zavitu "); // zobrazit výchozí stav
lcd.setCursor(0, 1);
lcd.print(" x = "); //
lcd.setCursor(PosCur, 1);
lcd.print(MaxOt);
lcd.setCursor(PosCur, 1);
lcd.cursor(); // zapnout kurzor a blikat?
// lcd.blink();
delay(1000);
while(StavTe > 0){ // čekání na stisk Enter (*)
StavTu = digitalRead(Tup); // při stisku tl. nahoru zvětšit MaxOt dle pozice kurzoru
if (StavTu == 0){
switch (PosCur){
case 11:
if (MaxOt < 900){
MaxOt = MaxOt + 100;
}
ZobrazCislo(MaxOt);
lcd.setCursor(PosCur, 1);
delay(500);
break;
case 12:
if (MaxOt < 980){
MaxOt = MaxOt + 10;
}
ZobrazCislo(MaxOt);
lcd.setCursor(PosCur, 1);
delay(500);
break;
case 13:
if (MaxOt < 998){
MaxOt = MaxOt + 1;
}
ZobrazCislo(MaxOt);
lcd.setCursor(PosCur, 1);
delay(500);
break;
}
StavTu =1;
}
StavTd = digitalRead(Tdown); // při stisku tl. dolu zmenšit MaxOt dle pozice kurzoru
if (StavTd == 0){
switch (PosCur){
case 11:
if (MaxOt >= 100){
MaxOt = MaxOt - 100;
}
ZobrazCislo(MaxOt);
lcd.setCursor(PosCur, 1);
delay(500);
break;
case 12:
if (MaxOt >= 20){
MaxOt = MaxOt - 10;
}
ZobrazCislo(MaxOt);
lcd.setCursor(PosCur, 1);
delay(500);
break;
case 13:
if (MaxOt >= 1){
MaxOt = MaxOt - 1;
}
ZobrazCislo(MaxOt);
lcd.setCursor(PosCur, 1);
delay(500);
break;
}
StavTd = 1;
}
StavTr = digitalRead(Tright); // při stisku tl. doprava posunout pozici kurzoru
if (StavTr == 0){
if (PosCur < 13){
PosCur++;
lcd.setCursor(PosCur, 1);
delay(500);
}
StavTr = 1;
}
StavTl = digitalRead(Tleft); // při stisku tl. doleva posunout pozici kurzoru
if (StavTl == 0){
if (PosCur > 11){
PosCur--;
lcd.setCursor(PosCur, 1);
delay(500);
}
StavTl = 1;
}
StavTe = digitalRead(Tenter); // test na stisk (*)
//delay(500);
}
StavTe = 1;
lcd.noCursor(); //vypnout kurzor
lcd.setCursor(0, 1);
lcd.print(Msetup);
delay(500);
}




