

Nebudeme ti nic nalhávat. Robot patří mezi nejvyhledávanější projekty bastlířů.
Samozřejmě je mezi TOP projekty třeba i meteostanice.
Robotů je celá řada a v tomto článku ti popíšeme toho našeho – LBot a zároveň vysvětlíme i to, z čeho se roboti mohou skládat a co obsahují.
Typy robotů
Robot může buď jezdit po čáře, vyhýbat se překážkám, být řízen uživatelem nebo být kompletně autonomní. Hranice jsou dány jen a pouze tvojí představivostí, protože všechno je možné.
Robotů najdeme celou řadu, od kolových přes pásové až po létající. V tomto článku si do šroubku rozebereme toho našeho – kolového.
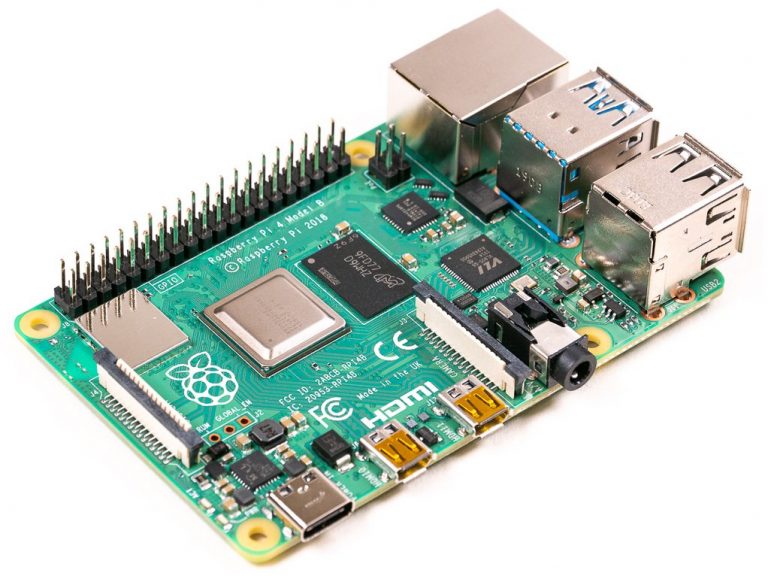
Řídící deska

Robota musí něco řídit. To něco je nejčastěji vývojová deska od Arduino (například Nano, Uno, Mega) nebo třeba Raspberry Pi (Zero, 4B aj) nebo velmi výkonné Rock Pi. Samozřejmě můžeš najít už hotové řídící desky speciálně určené pro řízení robota a zajištění komunikace s uživatelem.
My vybrali Arduino Nano – je to jedna z nejpopulárnějších Arduino desek a my s ní máme velmi dobré zkušenosti. Zároveň výkon mikrokontroléru stačí pro ovládání, řízení robota i komunikaci.
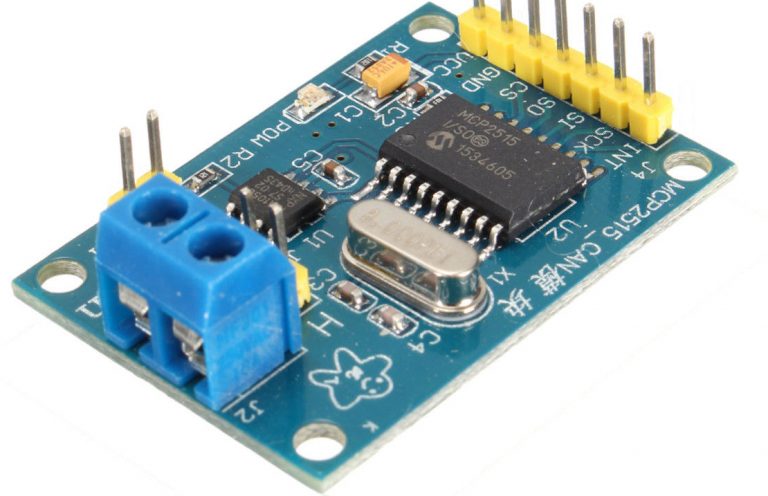
Komunikace

Mezi nejčastěji používaná rozhraní je Bluetooth nebo Wi-Fi. Díky tomu má robot přímé spojení s uživatelem a buď mu posílá své stavové informace nebo je naopak uživatelem řízen.
Pokud chceš použít Wi-Fi, můžeš použít nějakou desku s ESP8266 nebo ESP32 čipem, který v sobě má jak Wi-Fi rozhraní, tak i Bluetooth (platí pro ESP32).
My máme v nabídce Wemos D1 R32 Uno ESP32.
Bastlíři často používají HC-06, ten komunikuje skrze UART a jeho využití je velmi jednoduché. Samozřejmě jsme ho přidali do naší stavebnice robota LBot.
Robota tak můžeš ovládat třeba ze svého chytrého telefonu.

V našem LBOTovi používáme i infračervený přijímač. Takže kromě Bluetooth můžeš ovládat robota i přiloženým IR ovladačem.
Řízení motorů
Motory nemůžeš řídit přímo z Arduino Uno nebo Raspberry Pi. Potřebuješ tzv. Driver. To je obvod, který je řízen signály z Arduino Uno nebo RPi a na jejich základě řídí samotné motory (silová část).
Takových driverů máme celou řadu.
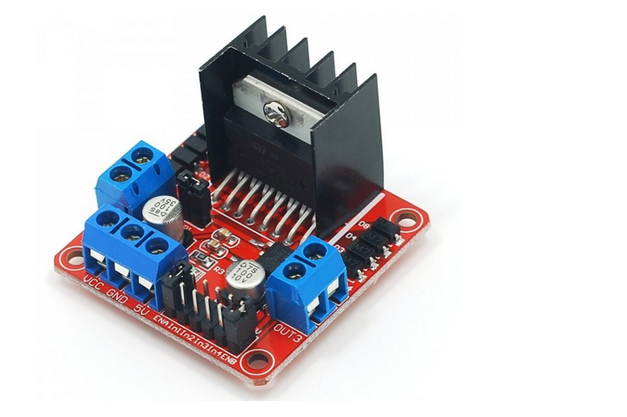

Pro krokové motory máme modul s ULN2003.
V naší stavebnici najdeš dvoumotorový driver TB6612FNG. Ten řídí obě postranní kola.
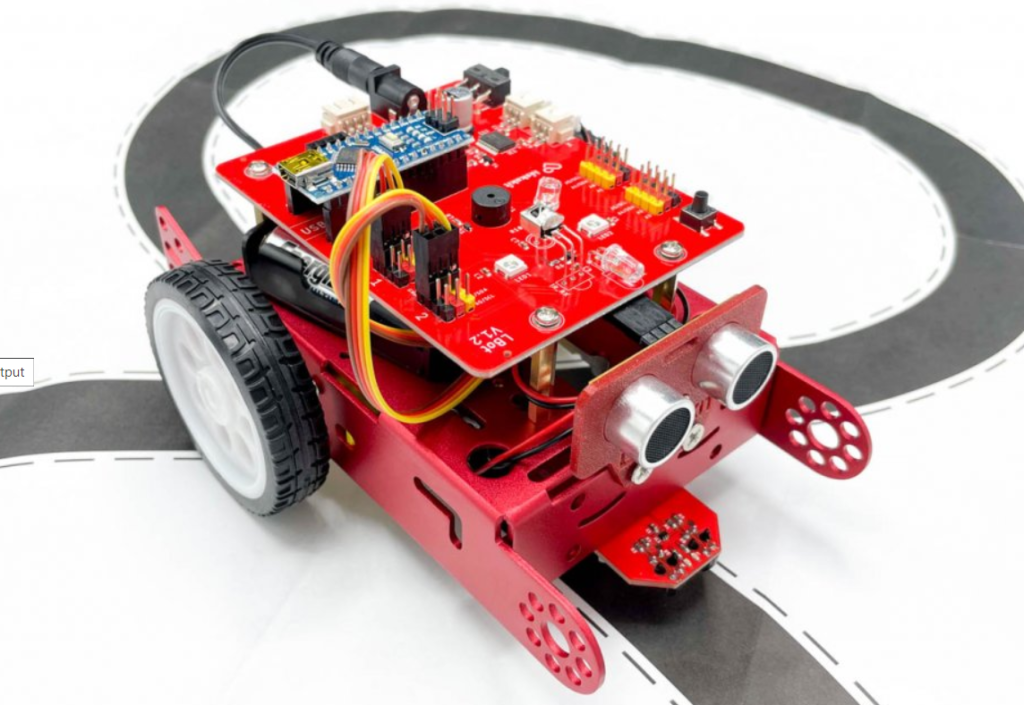
LBot – hardware nech na nás
LBot je připraven jak na autonomní jízdu po čáře, tak i ovládání přes Bluetooth (například tvůj telefon, notebook) nebo přiložený IR ovladač.
Díky ultrazvukovým senzorům je schopen detekovat překážky před sebou. Dvojice infračervených čidel zase může s přehledem sledovat čáru pod robotem.
Na našem githubu najdeš detailní popis LBota tak i vzorové kódy. Například pro komunikaci s IR přijímačem, Bluetooth, sledování čáry nebo využití ultrazvukových čidel.

Jako podvozek jsme vybrali osvědčený Makeblock MBot. Šasi je velmi lehké a zároveň mechanicky pevné díky použitému materiálu – hliníku.
Celý LBot je postavený na naší desce, kam se postupně zapojují další moduly – Arduino Uno, Driver motoru, Bluetooth modul a další.
LBot je napájen z AA baterií, celkem jsou tam 4 kusy. To je dostatek energie na dlouhé hraní.
LBota najdeš na našem e-shopu https://www.laskakit.cz/laskkit-lbot-v1-0-stavebnice-robota/




Jedna odpověď
jakse virabjej roboti